Water and rail infrastructure are one of the cornerstones of smart grids, such as smart cities. In them, algorithms are found everywhere.
Challenges in Water and Rail infrastructure
Many parts of the infrastructure are decades old and have high maintenance costs
Preventative maintenance of components (motor, chain, wiring, jackscrew, etc.) is required to reduce costs and maintain safety
Less service disruptions and customer complaints
No control of assets, and so no idea if assets are working properly
New analysis methods required, as existing infrastructure cannot be dismantled for installation of traditional sensors
Most of the infrastructure has been built when security was not an issue. This makes the infrastructure an easy target for hackers and terrorists
Decades old infrastructure
Many parts of the infrastructure are decades old. That’s also one of the reasons that they have high maintenance costs. Besides, regular maintenance consists of doing regular maintenance rounds. Here, every device gets the same attention. However, with preventative maintenance, you can focus on devices which really need it.
Less service disruptions and customer complaints
So, with preventative maintenance, you’ll not only reduce costs. But even more important: devices maintain to be safe for users. Due to timely recognition, you can plan maintenance before a little fault has led to real damage. So, you have less service disruption and more customer satisfaction.
No control of assets
Another challenge we hear is that companies have no control of assets, and so no idea if assets are working properly. Maybe companies have control of the assets they recognize. However, they have no idea if all devices are in scope and how these are connected.
New analysis methods required
The above-mentioned means that new analysis methods are required. However, the existing infrastructure cannot be dismantled for installation of traditional sensors.
Security of assets
Most of the infrastructure has been built when security was not an issue. This makes the infrastructure an easy target for hackers and terrorists
Find out how you can solve your IoT solutions with our algorithms!
https://www.advsolned.com/wp-content/uploads/2020/04/sluice.jpg5801280ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2020-04-24 14:44:272020-04-24 14:45:21Control and improve critical components in your waterworks and railway infrastructure
Biomedical devices are one of the golden nuggets of IoT.
What are the challenges?
Tightening of health system budgets
Higher treatment costs due to an aging population
Long patient waiting times
Protection of patient medical data from hackers
Biomedical devices are one of the golden nuggets of IoT. The medical industry has the challenge that health system budgets are being tightened. This is further complicated by an aging population with higher life expectancy and higher demands for medical treatment. As a consequence, serving a population with an increasing aging population means that there will be longer patient waiting times and increased medical costs. Smart medical devices are viable solution to facilitate this for many people, especially the elderly who greatly value their independence.
Exercises at home
A lot of time is lost travelling to therapy appointments, and for elderly people with limited mobility, this is not always possible. A much more efficient method is to allow patients to do their exercises at home. Smart sensors provide a simple way of ‘measuring if they do their exercises correctly’ and if they are on track for recovery. Patients don’t have to travel and spend hours sitting in a waiting room. The therapist just has to follow the patients’ developments and make an appointment when necessary. And at an appointment, the therapist can easily dive into details, because the patient has followed his recovery themselves. This frees up the therapists’ time, and allows them to focus on the patients with more serious injuries.
Security
Meanwhile, there is the need for protection of patient medical data from hackers. Hospitals are an interesting target for terrorists and other evil-doers. That’s why prevention from being hacked is very important. And if you are being hacked, then you want to know as soon as possible, so you can take action in time, before a hacker has caused any serious damage.
In the IoT of medical devices, algorithms play an important role. Use our algorithms to filter and analyse your ECG and EMG signals. Read more about help with your challenges: https://www.advsolned.com/biomedical/
https://www.advsolned.com/wp-content/uploads/2020/04/ecg.jpg5801250ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2020-04-20 09:48:452020-04-23 10:49:09Automate the tasks of trained medical staff for home users
6 reasons why ASN Filter Designer is a powerful real-time DSP platform e.g. life math scripting, tool creates your technical specification and documentation
Op het KPN Event van 12 september 2019 stond samenwerking centraal. In het bijzonder ten aanzien van 5GDe komende industriële revolutie is onlosmakelijk verbonden met 5G.
“Met OEM partners zoals Advanced Solutions Nederland, Alcochem, ExRobotics, Semiotic Labs Topcon Agriculture en enkele tientallen start-ups wordt nauw samengewerkt. Het 5G-ecosysteem vereist samenwerking en openheid naar partners. De nieuwe benadering van de zakelijke markt is voor KPN al realiteit. Paul Cobben, sector developer manufacturing bij KPN, besluit: ‘KPN is actief in Smart Industry, in diverse fieldlabs. We geven graag samen met de maakindustrie invulling aan wireless factories en de use cases die dit mogelijk maakt. Daarmee is KPN een echte ‘enabler’ voor de smart industry en kunnen we onze klanten concreet ondersteunen bij hun digitale transformatie.'” Lees het verslag op de KPN site:
There is an increasing use of the water infrastructure, while the current demand is already adjacent to the existing capacity. However, space for physical expansion is limited. On the other hand, there is a tightening of budgets, while maintenance of water infrastructure comes with high costs.
Huge cost savings as well as reducing public inconvenience can be achieved with a preventative maintenance program. Benefits of a preventive maintenance program are:
A longer lifetime for your equipment with preventive maintenance
Be in control and optimize your processes
Optimize your just-in-time management and get more value by delivering guarantees
Increase security for your cargo and your equipment
Struggle with the elements
Working at water is a struggle with the elements: water, wind, dust, heat, pressure. So, you want to know if pipelines are going to leak before they are actually leaking. When cables are beginning to wear out. If the oil is still on the right level. That you can act when dust or smear are blocking lenses. With IoT, you can predict and prevent equipment failure by monitoring product wear and replacement rates. As such, you improve the reliability of your assets and reduce downtime. And if you recognize little faults, you can solve them easily before they have become big and expensive problems.
Rust
Another time- and money saver is the maintenance in the port: one of the worst enemies is rust. No wonder, that the in- and outside of the ship is painted very often. Even when there is no rust, ‘just in case’. It is better to place a rust sensor: it warns when there is rust and those places can be painted or otherwise maintained. And it makes sure spots are not forgotten. Even more: a rust sensor can track rust at places which are hardly reachable. An employee only has to go to this hard-to-reach part when it is really needed.
How preventive maintenance works
In essence, algorithms and analytics monitor sensor data. They look for deviations in a physical process’s normal operation. Examples are the wear and tear in a water sluice’s mechanical components, or even damaged wiring for the pump.
A sensor fusion algorithm merges data from different sensors. Associated analytics determine whether a component’s characteristic is normal for its age. Any deviations outside ‘normal operation’ are fed back to the master system as potential sources of failure.
https://www.advsolned.com/wp-content/uploads/2018/08/shutterstock_134100869oil_chains_1130.jpg7511130ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2019-12-04 09:23:212020-04-23 10:50:28Smart Water: Less delay due to timely maintenance
Energy companies have struggled for years with meeting demand with supply with society’s increasing demand for energy. This been made even more challenging with more people using electric vehicles and smart cities demanding more lighting.
Modern IoT sensors and smart grid solutions help energy companies and consumers improve and optimize the modern grid for the 21st century. But what does all the jargon really mean?
Blackout
The UK National Grid recently experienced a major outage that left almost a million homes in the dark and forced trains to a standstill. The source of the blackout was traced back to two generators that failed, resulting in grid’s frequency falling below the critical 49.5Hz set by the regulator.
According to the media the UK blackout was triggered when the frequency slumped to 48.88Hz, which is well below the legal limits set by the regulatory agencies.
But what do these limits really mean?
Some background information
The energy grid frequency is 50Hz in Europe, 60Hz in the US. Japan has an unusual historical situation in that the East of the country runs on a European 50Hz system and the West of country runs on an American 60Hz system.
In all cases, in order to meet the energy requirements, several generators are needed to work in parallel and must be synchronised. Accurate frequency control is required to control the amount of power delivered by multiple generators in order to provide a stable power supply to consumers. The challenge for the energy companies is meeting the changes in supply and demand, since higher demand than supply will result in fall of frequency and vice versa.
Thus, the challenge for IoT sensors and algorithms is measuring the operating frequency and phase to a sufficient accuracy and adjusting the generators to meet the energy demand requirement at that particular time. But how?
A PMU (phase measurement unit) is typically used the measure and report back (typically 30-60 measurements per second) to the network operator what the actual frequency and phase of various points on the grid are. In order to synchronise the measurements, the PMU internal clocks are time synchronised via a GPS (global positioning system) unit, such that all reported frequency and phase measured across the grid are time aligned.
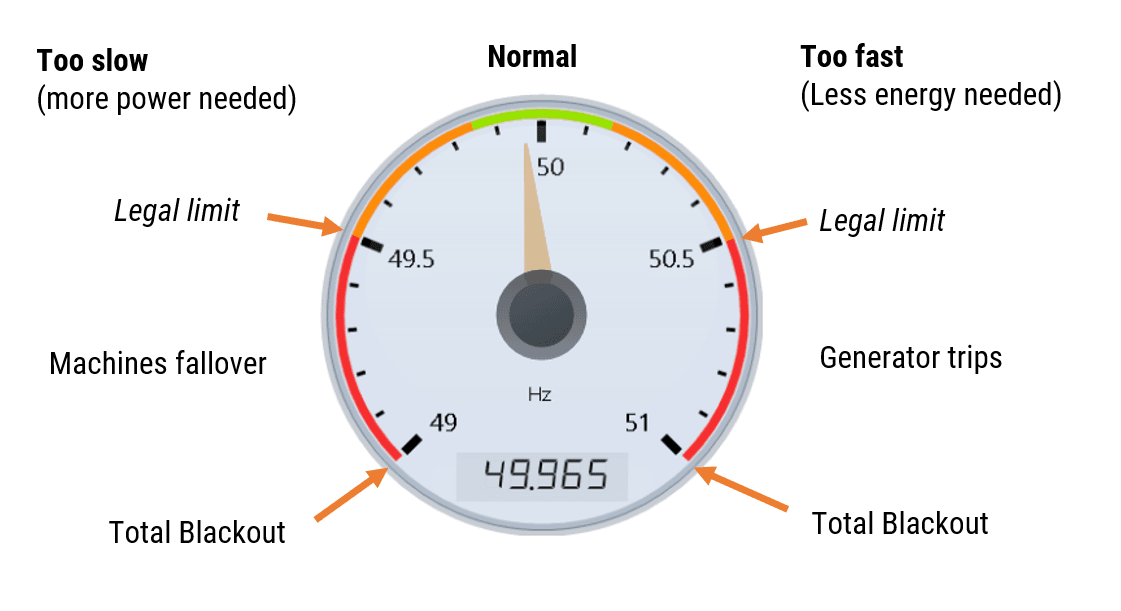
The frequency limits are shown below:
The challenge for energy managers
As seen above, the normal region in Europe is between 49.85 – 50.15Hz. If the generators exceed 50.15Hz (entering the orange region), there is too much energy and the generators need to be rolled back a little. If the frequency falls below 49.85Hz (also in the orange region), there is not enough energy to meet demand, and more energy is needed. In all cases, the frequency must never enter the red region, otherwise Blackouts will occur.
The energy company is legally obliged to keep the powerline frequency between 49.5 – 50.5Hz (± 1%). This is typically tracked to an accuracy of ± 1mHz resolution.
Blackouts
The UK blackout was triggered when the frequency slumped to 48.88Hz, which is well below the legal limits and in the blackout region. The damage to the UK economy has still yet to be determined, but National Grid UK should be considering adding extra redundancy safe guards in order restore public confidence.
Dips and swells tracking
Another common problem that occurs is that of energy dips, i.e. the voltage momentarily drops for a few cycles. Think about lights temporarily flickering in your house.
In factories running machinery, this usually occurs when a machine is started up, indicating imminent component failure. Swells are the opposite of dips, but are much less common.
ASN’s IoT sensor and algorithms play an essential role in keeping the grid healthy, as demonstrated in the video below.
5G’s claim of ultra-low latency, and suitability for real-time edge processing has created a fever of interest in the IoT market. But what does Real-time dataset analysis really mean for your IoT application?
It’s estimated that the global smart sensor market will have over 50 billion smart devices in 2020. All of these IoT smart sensors (temperature, pressure, gas, image, motion, loadcells) will be connected to Wifi, 5G, LoRa etc network services via embedded processors performing real-time signal processing on the captured datasets.
But there are a number of challenges….
IoT sensor measurement challenge
A common challenge is that many sensors used in these applications require a little bit of filtering in order to clean the measurement data in order to make it useful for analysis.
Let’s have a look at what sensor data really is…. All sensors produce measurement data. These measurement data contain two types of components:
Wanted components, i.e. information what we want to know
Unwanted components, measurement noise, 50/60Hz powerline interference, glitches etc – what we don’t want to know
Unwanted components degrade system performance and need to be removed.
So, how do we do it?
DSP means Digital Signal Processing and is a mathematical recipe (algorithm) that can be applied to IoT sensor measurement data in order to clean it and make it useful for analysis.
But that’s not all! DSP algorithms can also help in analysing data, producing more accurate results for decision making with ML (machine learning). They can also improve overall system performance with existing hardware (no need to redesign your hardware – a massive cost saving!), and can reduce the data sent off to the cloud by pre-analysing data and only sending what is necessary.
Do you have a practical example?
All analog sensor signals need to be sampled by a digital system in order to make them usable for analysis in the digital domain. The choice of the sampling frequency is primarily goverend by the maximum frequency that needs to be analysed. But what are design rules?
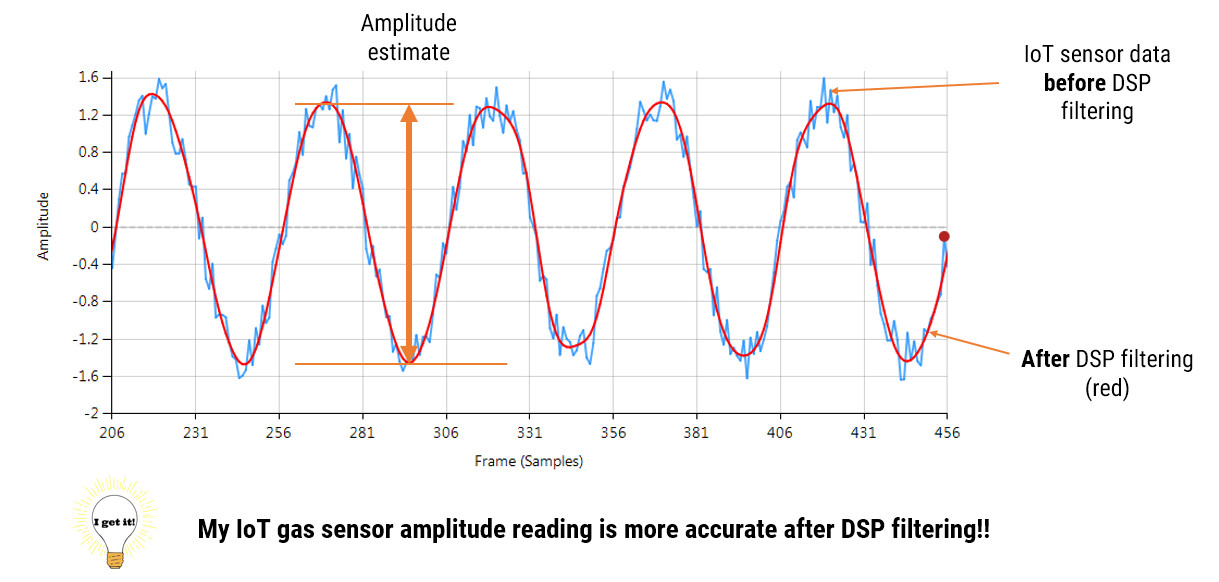
Consider the following application for gas sensor measurement (see the figure below). The requirement is to determine the amplitude of the noisy sinusoid (shown in blue) in order to get an estimate of gas concentration, where the bigger amplitude, the more the gas concentration.
In order to clean the noisy sinusoid with a filtering algorithm (results shown in red), we first need to find what the frequency of the sinusoid is. The Nyquist sampling Theorem is used for determining this value, and states that,
the analog signal must be sampled at a least two times the maximum analog frequency component.
For our gas sensor, the frequency of the blue sinusoid is about 5Hz, so a minimum sampling frequency of 10Hz is required in order to perform valid analysis on the sampled dataset. However, many designers choose a value 10 times higher than Nyquist in order account for the effects of the noise component and not to be on the borderline of the Nyquist-sampling theorem.
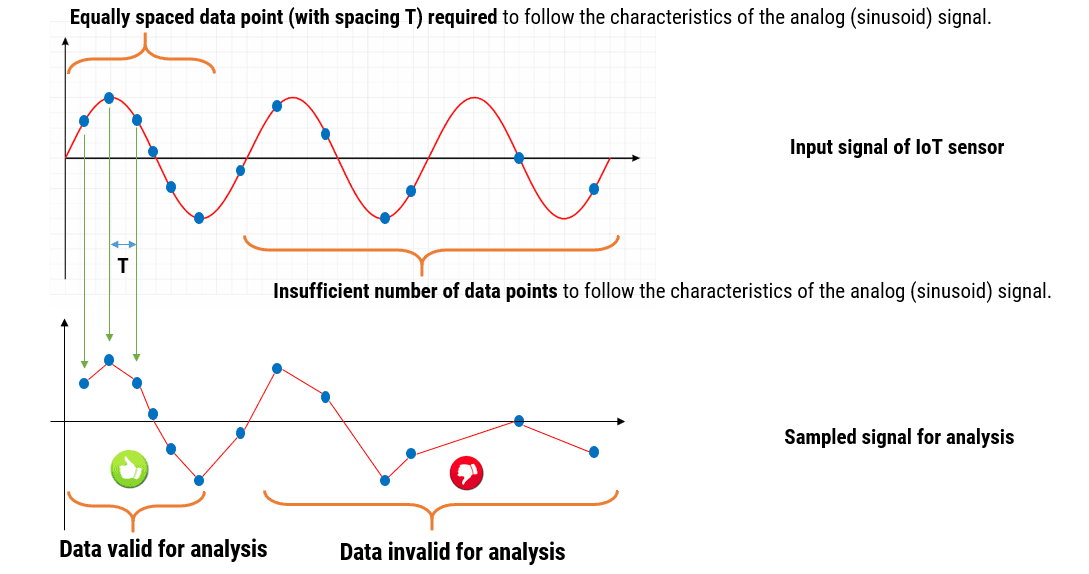
The concept of sampling is demonstrated below:
What does Real-time really mean?
Many clients ask us to clarify what real-time really means.
Most people assume that an instant response to a button push or event means real-time. However, the reality is a little more complicated, as a real-time system means that the response is deterministic occurring within a known time frame. This could be seconds or even micro-seconds. In all cases, the response or action time is always known.
For the gas sensor discussed above, the sampling frequency must be constant in order to correctly follow the characteristics of the sinusoid. If the sampling rate varied over time, the sampled data wouldn’t match the design criteria of the algorithmic filtering blocks, and the data analysiswould be invalid.
In recent years, much has been said about 5G’s potentially ultra-low latency, and suitability for real-time edge processing. Time will tell how far 5G’s low latency claim can be realised. However, latency in network/cloud services, means that no communication channel can be guaranteed to be real-time 100% of the time. This is further complicated by the requirement of meeting the Nyquist-sampling criteria for sampling analog sensors signals.
In light of all of these issues, our experience has shown that real-time sensor processing (especially for critical automotive or industrial control operations) should be performed at the edge on an embedded real-time processor for maximum reliability and safety.
Our close collaboration with leading technology companies, such as: Arm, Texas Instruments and KPN ensure that our 5G IoT solutions are built with the latest design paradigms using the best of today’s sensor and networking technology.
https://www.advsolned.com/wp-content/uploads/2019/08/5g.jpg594810ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2019-08-04 20:04:242019-08-04 20:15:29IoT Real-time dataset analysis with 5G: the big challenges
When considering an asset track and trace IoT application in a factory or warehouse, many think of the well-established Barcode or QR code. Although this technology is firmly embedded into modern society as a reliable, low cost and easy to understand pillar for tracking and tracing assets, many companies were quick to adopt the technology as an easy way of minimising human errors and increasing process efficiency.
However, when managing the location of thousands of assets, this simple system is somewhat limited in the overview that it can provide an ERP (enterprise requirements system) system. A significant aspect of Industry 4.0 is process transparency, providing the ERP and BI (business intelligence) systems with the most update-to-date information, allowing management to identify bottlenecks and potential areas of weakness.
Until several years ago, asset tracking was strengthened by combining RFID tags with GPS (global positioning system) technology. Although this was certainly a step in the right direction, the implementation costs were high and technology suffered from RF interference, short range and moderate location accuracy. GPS also had the big disadvantage of only being able to work outdoors and has a location accuracy of several metres – not really suitable!
Industry 4.0 real time location systems (RTLS)
Over the years, different technology has appeared as solution to providing real-time assets location information to the ERP system. As mentioned above, technologies, such as RFIDs, bar codes and GPS have certainly been a step in the right direction, but didn’t fully meet the requirements of modern businesses look to optimise their processes.
Ultrawide band (UWB) radar
With advances in radar technology over the last few years, a few silicon vendors are now producing affordable UWB radar devices suitable for trace and trace applications. Radar technology that used to cost thousands of Euros, and was primarily aimed a military technology, is now available for tens of Euros, making it viable candidate for track and trace applications.
UWB highlights
Ten times more accurate than GPS, Wi-Fi or Bluetooth with typical accuracies a good as 10cm.
Hundreds of metres range with data communication options.
Very low power and safe for humans – power emission typically a fraction of percent of a typical Wi-Fi router.
Licence free ISM band, meaning no complicated ETSI/FCC certification and lower implementation costs.
Penetrates walls and doors, making it ideal for warehouses and buildings.
Contemporary UWB based solutions finally allow for a true RTLS implementation, giving enterprises control over their personnel and assets. Whether tracking containers through a supply chain, optimising manufacturing processes, or providing asset traceability, an RTLS-UWB system provides an ERP system with real-time situation awareness that can be acted upon instantly.
Benefits for your enterprise
Inventory accuracy: achieve 99.9% inventory accuracy without the need for meticulous manual audits that can take hours or even days. An RTLS-UWB system provides you with all of your asset location information in real-time.
Live situation update: feed the ERP and BI systems with an accurate real-time picture of asset location and personnel trends.
Personnel safety: attaching tags to your employees helps track process efficiency and may also be used to alert personnel about entering dangerous areas. The tag locations are also invaluable in case of an emergency, such as fire, as the location of all personnel is known at all times.
e-paper and sensors: modern tags use e-paper technology to only display the most up-to-date information (e.g. QR code, sensor readings). Extra sensor information, such as temperature, humidity and vibration provide a simple way of establishing anti-tampering and asset health.
Advanced Solutions Nederland (ASN) BV is an international market leader in innovative IoT smart sensor and track and trace RTLS-UWB technological solutions.
IIR (infinite impulse response) filters are generally chosen for applications where linear phase is not too important and memory is limited. They have been widely deployed in audio equalisation, biomedical sensor signal processing, IoT/IIoT smart sensors and high-speed telecommunication/RF applications and form a critical building block in algorithmic design.
Advantages
Low implementation footprint: requires less coefficients and memory than FIR filters in order to satisfy a similar set of specifications, i.e., cut-off frequency and stopband attenuation.
Low latency: suitable for real-time control and very high-speed RF applications by virtue of the low coefficient footprint.
May be used for mimicking the characteristics of analog filters using s-z plane mapping transforms.
Disadvantages
Non-linear phase characteristics.
Requires more scaling and numeric overflow analysis when implemented in fixed point.
Less numerically stable than their FIR (finite impulse response) counterparts, due to the feedback paths.
Definition
An IIR filter is categorised by its theoretically infinite impulse response,
Practically speaking, it is not possible to compute the output of an IIR using this equation. Therefore, the equation may be re-written in terms of a finite number of poles \(p\) and zeros \(q\), as defined by the linear constant coefficient difference equation given by:
where, \(a(k)\) and \(b(k)\) are the filter’s denominator and numerator polynomial coefficients, who’s roots are equal to the filter’s poles and zeros respectively. Thus, a relationship between the difference equation and the z-transform (transfer function) may therefore be defined by using the z-transform delay property such that,
As seen, the transfer function is a frequency domain representation of the filter. Notice also that the poles act on the outputdata, and the zeros on the inputdata. Since the poles act on the output data, and affect stability, it is essential that their radii remain inside the unit circle (i.e. <1) for BIBO (bounded input, bounded output) stability. The radii of the zeros are less critical, as they do not affect filter stability. This is the primary reason why all-zero FIR (finite impulse response) filters are always stable.
A discussion of IIR filter structures for both fixed point and floating point can be found here.
Classical IIR design methods
A discussion of the most commonly used or classical IIR design methods (Butterworth, Chebyshev and Elliptic) will now follow. For anybody looking for more general examples, please visit the ASN blog for the many articles on the subject.
ASN Filter Designer’s graphical designer supports the design of the following four IIR classical design methods:
Butterworth
Chebyshev Type I
Chebyshev Type II
Elliptic
The algorithm used for the computation first designs an analog filter (via an analog design prototype) with the desired filter specifications specified by the graphical design markers – i.e. pass/stopband ripple and cut-off frequencies. The resulting analog filter is then transformed via the Bilinear z-transform into its discrete equivalent for realisation.
Biquad implementations are advocated for numerical stability.
The Bessel prototype is not supported, as the Bilinear transform warps the linear phase characteristics. However, a Bessel filter design method is available in ASN FilterScript.
As discussed below, each method has its pros and cons, but in general the Elliptic method should be considered as the first choice as it meets the design specifications with the lowest order of any of the methods. However, this desirable property comes at the expense of ripple in both the passband and stopband, and very non-linear passband phase characteristics. Therefore, the Elliptic filter should only be used in applications where memory is limited and passband phase linearity is less important.
The Butterworth and Chebyshev Type II methods have flat passbands (no ripple), making them a good choice for DC and low frequency measurement applications, such as bridge sensors (e.g. loadcells). However, this desirable property comes at the expense of wider transition bands, resulting in low passband to stopband transition (slow roll-off). The Chebyshev Type I and Elliptic methods roll-off faster but have passband ripple and very non-linear passband phase characteristics.
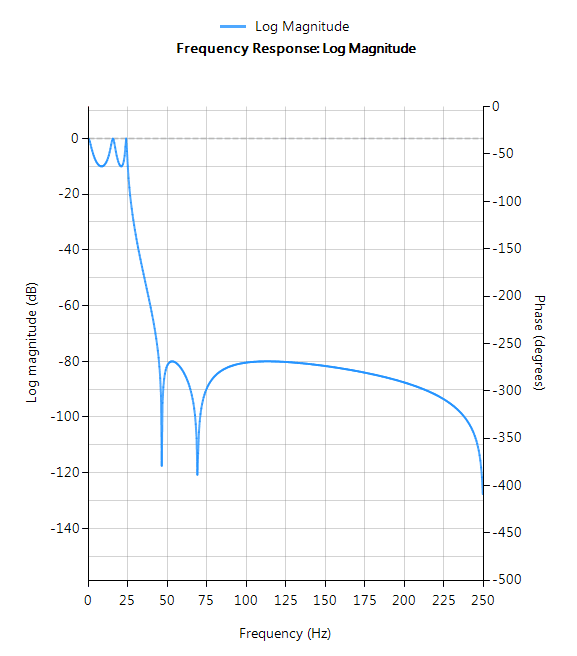
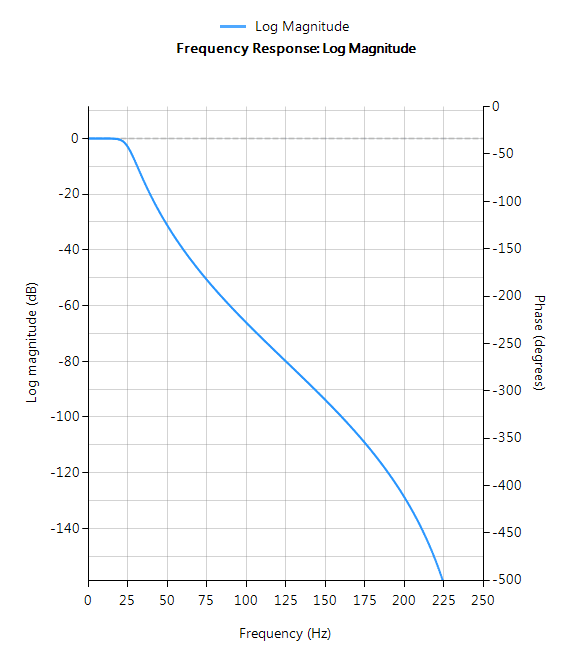
Comparison of classical design methods
The frequency response charts shown below, show the differences between the various design prototype methods for a 5th order lowpass filter with the same specifications. As seen, the Butterworth response is the slowest to roll-off and the Elliptic the fastest.
Elliptic
Elliptic filters offer steeper roll-off characteristics than Butterworth or Chebyshev filters, but are equiripple in both the passband and the stopband. In general, Elliptic filters meet the design specifications with the lowest order of any of the methods discussed herein.
Filter characteristics
Fastest roll-off of all supported prototypes
Equiripple in both the passband and stopband
Lowest order filter of all supported prototypes
Non-linear passband phase characteristics
Good choice for real-time control and high-throughput (RF applications) applications
Butterworth
Butterworth filters have a magnitude response that is maximally flat in the passband and monotonic overall, making them a good choice for DC and low frequency measurement applications, such as loadcells. However, this highly desirable ‘smoothness’ comes at the price of decreased roll-off steepness. As a consequence, the Butterworth method has the slowest roll-off characteristics of all the methods discussed herein.
Filter characteristics
Smooth monotonic response (no ripple)
Slowest roll-off for equivalent order
Highest order of all supported prototypes
More linear passband phase response than all other methods
Good choice for DC measurement and audio applications
Chebyshev Type I
Chebyshev Type I filters are equiripple in the passband and monotonic in the stopband. As such, Type I filters roll off faster than Chebyshev Type II and Butterworth filters, but at the expense of greater passband ripple.
Filter characteristics
Passband ripple
Maximally flat stopband
Faster roll-off than Butterworth and Chebyshev Type II
Good compromise between Elliptic and Butterworth
Chebyshev Type II
Chebyshev Type II filters are monotonic in the passband and equiripple in the stopband making them a good choice for bridge sensor applications. Although filters designed using the Type II method are slower to roll-off than those designed with the Chebyshev Type I method, the roll-off is faster than those designed with the Butterworth method.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
In recent years, major microcontroller IC vendors such as: ST, NXP, TI, ADI, Atmel/Microchip, Cypress, Maxim to name but a few have based their modern 32-bit microcontrollers on Arm’s Cortex-M processor cores. This exciting trend means that algorithms traditionally undertaken in expensive DSPs (digital signal processors) can now be integrated into a powerful low-cost and power efficient microcontroller packed full of a rich assortment of connectivity and peripheral options, which is ideal for many IoT applications.
For many IC vendors, the coupling of DSP functionality with the flexibility of a low power microcontroller, has allowed them to offer their customers a generation of so called 32-bit enhanced microcontrollers suitable for a variety of practical applications. More importantly, this marriage of technologies has also allowed designers working on price critical IoT applications to implement complex algorithmic concepts, while at the same time keeping the overall product cost low and still achieving excellent low power performance.
Upgrading legacy analog filters with the ASN Filter Designer
Analog filters have been around since the beginning of electronics, ranging from simple inductor-capacitor networks to more advanced active filters with op-amps. As such, there is a rich collection of tried and tested legacy filter designs for a broad range of sensor measurement applications.
ASN’s FilterScript symbolic math scripting language offers designers the ability to take an existing analog filter transfer function and transform it to digital with just a few lines of code. The ASN Filter Designer’s Arm automatic code generator analyses the designed digital filter and then automatically generates Arm CMSIS-DSP compliant C code suitable for direct implementation on a Cortex-M based microcontroller.
Arm CMSIS-DSP software framework
The Arm CMSIS-DSP (Cortex Microcontroller Software Interface Standard) software framework is a rich collection of over sixty DSP functions (including various mathematical functions, such as sine and cosine; IIR/FIR filtering functions, complex math functions, and data types) developed by Arm that have been optimised for their range of Cortex-M processor cores.
The framework makes extensive use of highly optimised SIMD (single instruction, multiple data) instructions, that perform multiple identical operations in a single cycle instruction. The SIMD instructions (if supported by the core) coupled together with other optimisations allow engineers to produce highly optimised signal processing applications for Cortex-M based micro-controllers quickly and simply.
Mathematically modelling an analog circuit
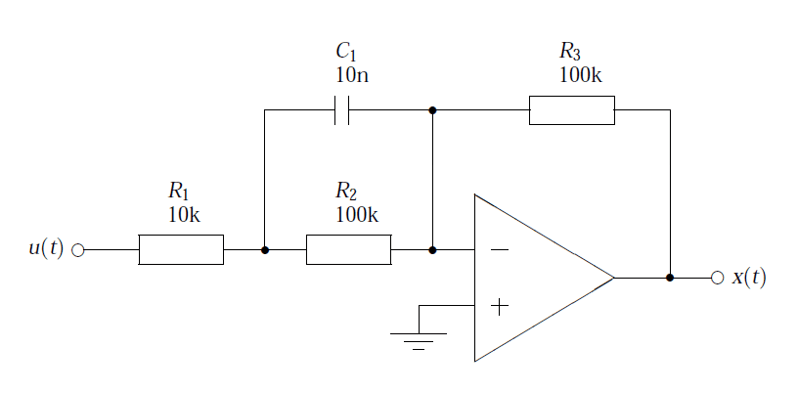
Consider the active pre-emphasis filter shown below. The pre-emphasis filter has found particular use in audio work, since it is necessary to amplify the higher frequencies of the speech spectrum, whilst leaving the lower frequencies unaffected. The R and C values shown are only indented for the example, more practical values will depend on the application. A powerful method of reproducing the magnitude and phases characteristics of the analog filter in a digital implementation, is to mathematically model the circuit. This circuit may be analysed using Kirchhoff’s law, since the sum of currents into the op-amp’s inverting input must be equal to zero for negative feedback to work correctly – this results in a transfer function with a negative gain.
Therefore, using Ohm’s law, i.e. \(I=\frac{V}{R}\),
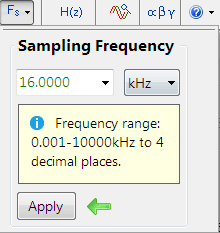
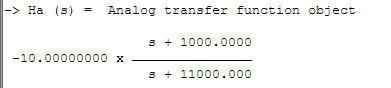
Analysing the cut-off frequencies in \(H(s)\), we see that the upper frequency is at \(11000 rad/sec\) or \(1.75kHz\). Therefore, setting the sampling rate to \(16kHz\) should be adequate for modelling the filter in the digital domain.
The sampling rate options are avaliabe in the main filter design UI (shown on the left).
ASN FilterScript
\(H(s)\) can be easily specified in FilterScript with the analogtf function, as follows:
Notice how the negative gain may also be entered directly into function’s argument. The symbolic keyword generates a symbolic transfer function representation in the command window.
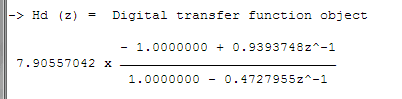
Applying the Bilinear z-transformation via the bilinear command with no pre-warping, i.e.
Hd=bilinear(Ha,0,"symbolic");
Notice how the bilinear command automatically scales numerator coefficients by -1, in order to account for the effect of the negative gain. The command also automatically assigns the analog filter to the reference spectrum object, which can be shown via the ShowH2DM keyword. The complete code is shown below:
ClearH1; // remove other filters from the cascade
ShowH2DM; // show the analog reference spectrum
Main()
Nb={1,1000};
Na={1,11000};
Ha=analogtf(Nb,Na,-10,"symbolic");
Hd=bilinear(Ha,0,"symbolic");
Num=getnum(Hd);
Den=getden(Hd);
Gain=getgain(Hd);
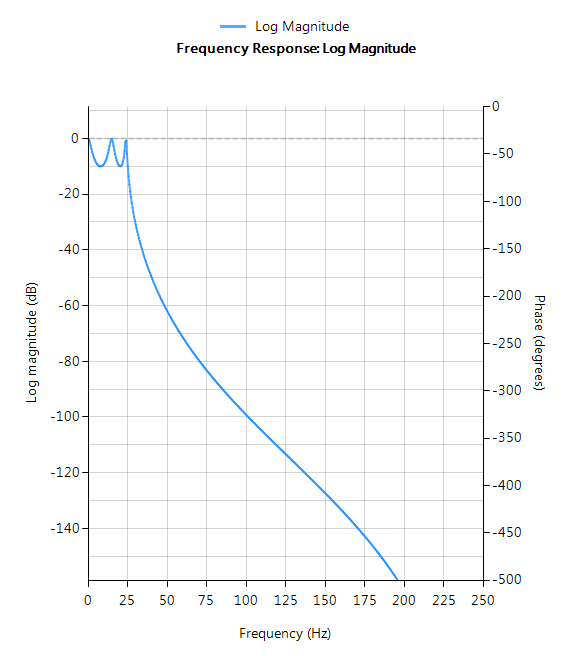
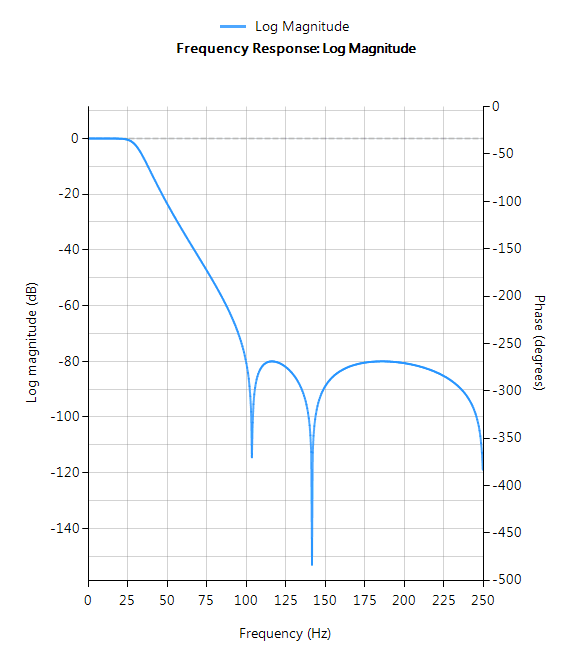
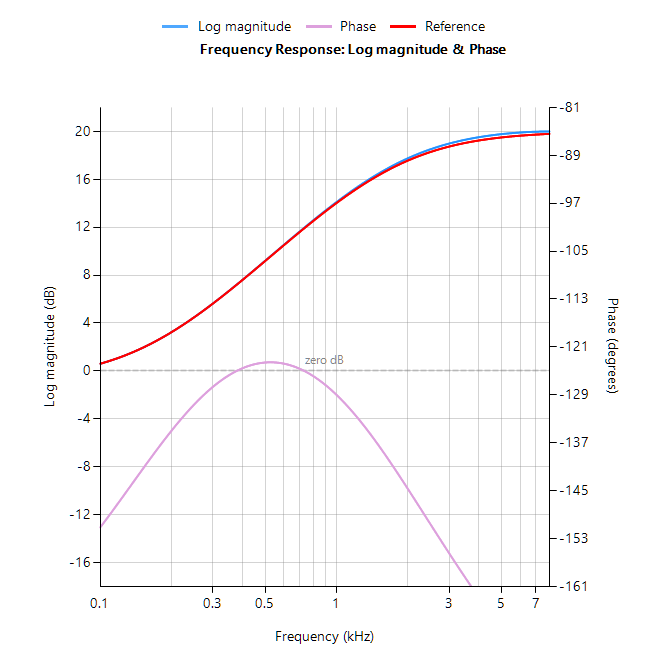
A comparison of the analog (shown in red) and discrete (shown in blue) magnitude spectra is shown below. Analysing the spectra, it can be seen that for a sampling rate of 16kHz the analog and digital filters are almost identical! This demonstrates the relative ease with which a designer can port their existing legacy analog designs into digital.
Automatic code generation to Arm Cortex-M processors
As mentioned at the beginning of this article, the ASN filter designer’s automatic code generation engine facilitates the export of a designed filter to Cortex-M Arm based processor cores via the CMSIS-DSP software framework.
The tool’s built-in analytics and help functions assist the designer in successfully configuring the design for deployment. Professional licence users may expedite the deployment by using the Arm deployment wizard that automates the steps described below.
Steps required for Educational licenceusers
Before generating the code, the H2 filter (i.e. the filter designed in FilterScript) needs to be firstly re-optimised (transformed) to an H1 filter (main filter) structure for deployment. The options menu can be found under the P-Z tab in the main UI.
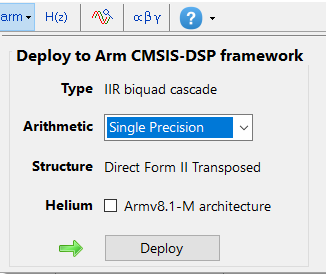
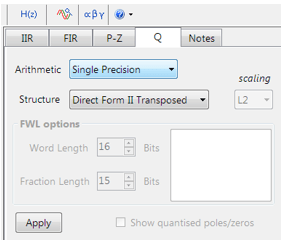
All floating point IIR filters designs must be based on Single Precision arithmetic and either a Direct Form I or Direct Form II Transposed filter structure. The Direct Form II Transposed structure is advocated for floating point implementation by virtue of its higher numerically accuracy.
Quantisation and filter structure settings can be found under the Q tab (as shown on the left). Setting Arithmetic to Single Precision and Structure to Direct Form II Transposed and clicking on the Apply button configures the IIR considered herein for the CMSIS-DSP software framework.
Arm CMSIS-DSP application C code
Select the Arm CMSIS-DSP framework from the selection box in the filter summary window:
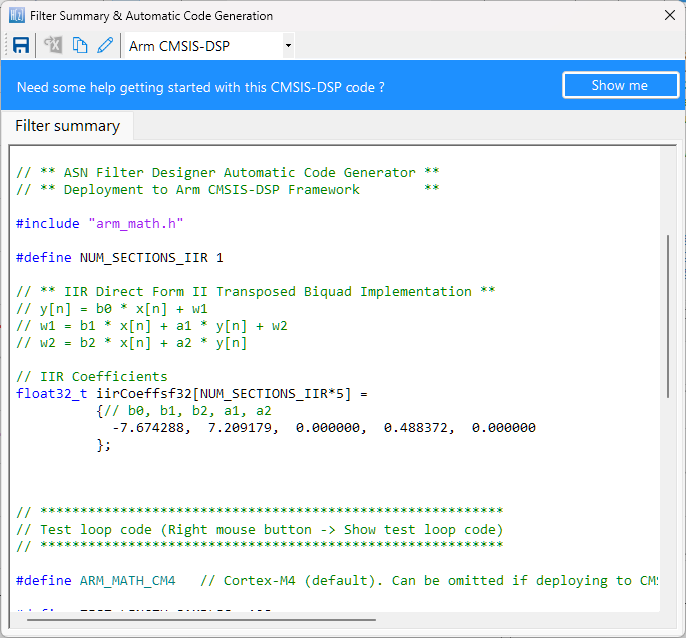
The automatically generated C code based on the CMSIS-DSP framework for direct implementation on an Arm based Cortex-M processor is shown below:
As seen, the automatic code generator generates all initialisation code, scaling and data structures needed to implement the IIR via the CMSIS-DSP library. This code may be directly used in any Cortex-M based development project – a complete Keil MDK example is available on Arm/Keil’s website. Notice that the tool’s code generator produces code for the Cortex-M4 core as default, please refer to the table below for the #define definition required for all supported cores.
ARM_MATH_CM0
Cortex-M0 core.
ARM_MATH_CM4
Cortex-M4 core.
ARM_MATH_CM0PLUS
Cortex-M0+ core.
ARM_MATH_CM7
Cortex-M7 core.
ARM_MATH_CM3
Cortex-M3 core.
ARM_MATH_ARMV8MBL
ARMv8M Baseline target (Cortex-M23 core).
ARM_MATH_ARMV8MML
ARMv8M Mainline target (Cortex-M33 core).
The main test loop code (not shown) centres around the arm_biquad_cascade_df2T_f32() function, which performs the filtering operation on a block of input data.
What have we learned?
The ASN Filter Designer provides engineers with everything they need in order to port legacy analog filter designs to a variety of Cortex-M processor cores.
The FilterScript symbolic math scripting language offers designers the ability to take an existing analog filter transfer function and transform it to digital (via the Bilinear z-transform or matched z-transform) with just a few lines of code.
The Arm automatic code generator analyses the designed digital filter and then automatically generates Arm CMSIS-DSP compliant C code suitable for direct implementation on a Cortex-M based microcontroller.
Extra resources
Step by step video tutorial of designing an IIR and deploying it to Keil MDK uVision.
Implementing Biquad IIR filters with the ASN Filter Designer and the Arm CMSIS-DSP software framework (ASN-AN025)
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2018/09/preempcircuit.png397796Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2018-09-14 14:51:342025-01-07 16:58:31Deploying legacy analog filters to Arm Cortex-M processor cores