Een Peaking of Bell filter is een type geluidsequalisatiefilter dat de grootte van een bepaalde set frequenties rond een centrumfrequentie versterkt of verzwakt om zo de magnitude van het geluid te egaliseren. Zoals te zien is in de grafiek hieronder, ontleent het filter zijn naam aan de vorm van het magnitudenspectrum (blauwe lijn) dat lijkt op een Bell-curve.
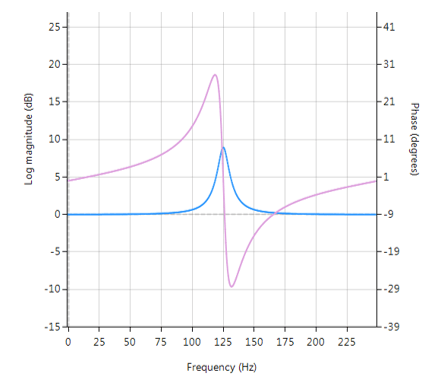
Frequentierespons (magnitude weergegeven in blauw, fase weergegeven in paars) van een 2e orde Bell-filter met een piek bij 125 Hz
All-pass filters
Centraal in het Bell-filter staat het zogenaamde All-pass filter. All-pass filters bieden een eenvoudige manier om de faserespons van een IIR te wijzigen/verbeteren zonder de grootte van de IIR te beïnvloeden. Als zodanig worden ze meestal aangeduid als fase-equalizers en hebben ze een bijzondere toepassing gevonden in digitale audiotoepassingen.
Een tweede orde all-pass filter is gedefinieerd als:
\( A(z)=\Large\frac{r^2-2rcos \left( \frac{2\pi f_c}{fs}\right) z^{-1}+z^{-2}}{1-2rcos \left( \frac{2\pi f_c}{fs}\right)z^{-1}+r^2 z^{-2}} \)
Merk op hoe de teller- en noemercoëfficiënten in spiegelbeeldig van elkaar zijn gerangschikt. De eigenschap van dit spiegelbeeld is wat de all-pass filter zijn gewenste eigenschap geeft, namelijk de ontwerper in staat stellen om de faserespons te veranderen terwijl de magnituderespons constant of vlak blijft over het volledige frequentiespectrum.
Een Bell filter kan worden geconstrueerd uit de \(A(z)\) filter door de volgende transferfunctie:
\(H(z)=\Large\frac{(1+K)+A(z)(1-K)}{2}\)
Na enige algebraïsche vereenvoudiging krijgen we de transferfunctie voor de Peaking of Bell filter als:
\(H(z)=\Large{\frac{1}{2}}\left[\normalsize{(1+K)} + \underbrace{\Large\frac{k_2 + k_1(1+k_2)z^{-1}+z^{-2}}{1+k_1(1+k_2)z^{-1}+k_2 z^{-2}}}_{all-pass filter}\normalsize{(1-K)} \right] \)
- \(K\) wordt gebruikt om de gain en het teken van de piek in te stellen
- \(k_1\) stelt de piek middenfrequentie in
- \(k_2\) stelt de bandbreedte van de piek in
Implementatie
Een Bell filter kan gemakkelijk ASN FilterScript worden geimplementeerd:
ClearH1; // clear primary filter from cascade
interface BW = {0,2,0.1,0.5}; // filter bandwidth
interface fc = {0, fs/2,fs/100,fs/4}; // peak/notch centre frequency
interface K = {0,3,0.1,0.5}; // gain/sign
Main()
k1=-cos(2*pi*fc/fs);
k2=(1-tan(BW/2))/(1+tan(BW/2));
Pz = {1,k1*(1+k2),k2}; // define denominator coefficients
Qz = {k2,k1*(1+k2),1}; // define numerator coefficients
Num = (Pz*(1+K) + Qz*(1-K))/2;
Den = Pz;
Gain = 1;
Deze code kan nu gebruikt worden om een geschikt Bell filter te ontwerpen, waarbij de exacte waardes van \(K, f_c\) en \(BW\) gemakkelijk kunnen worden gevonden door de interface variabelen te tweaken waarbij het resultaat in real-time te zien is, zoals hieronder weergegeven.
Directe aanpassingen in filter ontwerp
Bij de interactiviteit van de FilterScript IDE (geïntegreerde ontwikkelomgeving) staan de zogenaamde interfacevariabelen centraal. Een interface variabele wordt eenvoudigweg genoemd: een scalaire invoervariabele die gebruikt kan worden om een symbolische expressie te wijzigen zonder dat de code opnieuw gecompileerd hoeft te worden – dit stelt ontwerpers in staat om ‘on the fly’ te ontwerpen en snel tot een optimale oplossing te komen.
Zoals in het codevoorbeeld hierboven te zien is, moeten de interfacevariabelen worden gedefinieerd in de initialisatiesectie van de code, en kunnen ze constanten (zoals fs and pi) en eenvoudige wiskundige operatoren, zoals vermenigvuldigen * en /delen, bevatten. Dit wanneer het toevoegen van functies aan een interfacevariabele niet wordt ondersteund.
Een interfacevariabele wordt gedefinieerd als een vectorexpressie:
interface name = {minimum, maximum, step_size, default_value};
Waarbij alle vermeldingen echte scalaire waarden moeten zijn. Vectoren en complexe waarden worden niet gecompileerd.
[arve mp4=”https://www.advsolned.com/wp-content/uploads/2018/07/peakingfilter.mp4″ align=”right” loop=”true” autoplay=”true” nodownload nofullscreen noremoteplayback… /]
Real-time updates
Alle interfacevariabelen worden gewijzigd via de interfacevariabele regelaar GUI. Na het compileren van de code gebruikt u de interface variabele controller om de waarden van de interface variabelen te tweaken en de effecten op de overdrachtsfunctie te zien. Als u test op live audio, kunt u een geladen audiobestand streamen en de interfacevariabelen in real-time aanpassen om de effecten van de nieuwe instellingen te horen.
